技術問題問答
常用
-
傳感器選型時必須考慮哪些參數?
考慮到應用中的每個條件
在傳感器選型和系統設計中,所有條件都需要考慮到,尤其是以下幾點:
- 電氣要求,包括供電電源,測量峰值,響應時間 等di/dt and dv/dt.
- 機械要求,包括穿孔尺寸,體積,重量,材料,安裝和振動等
- 溫度條件,包括電流的波形與時間的關系,電流最大有效值,熱阻和冷卻條件。
- 環境條件,包括振動要求,工作溫度范圍,鄰近的其他導體或磁場。
確認可能的關鍵條件
某些應用場合極為復雜,需考慮多種可能的要求,例如:
- 電磁影響
- 明顯的暫態共模電壓 (dv/dt)
- 機械擾動(振動,沖擊等)
- 特殊的絕緣或局放要求
- 要求符合特殊標準等
實際測試
很顯然,最佳方案是在特定的應用環境下進行實際測試。如果無法實現,請提供給LEM您的安裝簡圖和詳細的傳感器工作條件(如具體的環境條件,被測波形,附近可能存在的干擾源如電感、載流導體、磁性材料或者其他的傳感器)
-
原邊額定電流或電壓的有效值怎樣確定?
有時也可稱為“連續的或額定的”電流(電壓),它指的是傳感器能夠長時間耐受的電流(電壓)
另一個定義是:在一定條件下流過傳感器的最大電流(電壓)有效值,傳感器持續工作狀態下其溫度而不超過限定值。這可以用標準的50H正弦信號測試。
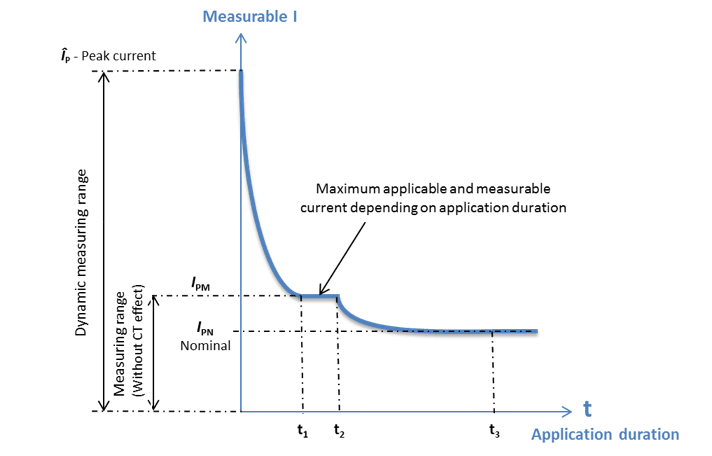
- “測量范圍”如何界定?
- 測量電阻或負載電阻(RM,RB)起到什么作用?
-
測量電阻(RM, RB)為何會有限制值?
測量電阻必須在規定的范圍內,傳感器才能安全有效地工作。
- 最小電阻設定值是為了對傳感器進行輸出功率熱保護。某些傳感器的最小電阻值允許設置為0?(計算時要考慮最大電源電壓)
- 最大電阻設定值決定了傳感器允許的電流/電壓輸出范圍。傳感器此時輸出不會電飽和。測量阻值太大將會減小傳感器的測量范圍(計算時以最小電源電壓考慮)。
如果測量值超出了傳感器的規格書上指定的范圍,請聯系我們的技術支持。根據您的應用條件(環境溫、電源電壓公差和最大電流/電壓)來計算出相應的電阻值。
-
什么是變比?
額定變比K是原邊額定電壓或電流與輸出的額定電壓或電流的比值。 對于閉環傳感器而言,變比NP/NS 約為匝數Kr的倒數 KR 例如,變比為1:1000對應著二次線圈匝數(KR = 1000) ,單匝原邊電流為1A時二次輸出電流就是1mA。

-
什么是損耗電流Ic?
它指的電源輸出的最大電流,即原邊測量電流或電壓為零時電流傳感器本身的最大電流損耗與不同測量電流對應的輸出電流之和。IS .此參數僅適用于電流輸出型的傳感器。
-
傳感器的電源應該如何選擇?
閉環傳感器在選取供電電源時,需要特別注意。基于閉環原理的電流或者電壓傳感器,其電流損耗IC 可分為兩部分,一部分是傳感器內部固定損耗,另一部分是被測電流或電壓導致的輸出損耗。(IS).第二部分可計算如下:
- 對于電流傳感器:IS輸出電流=原邊峰值電流×變比
- 對于電壓傳感器: IS 輸出電流=(原邊峰值電壓/原邊電阻)×變比
-
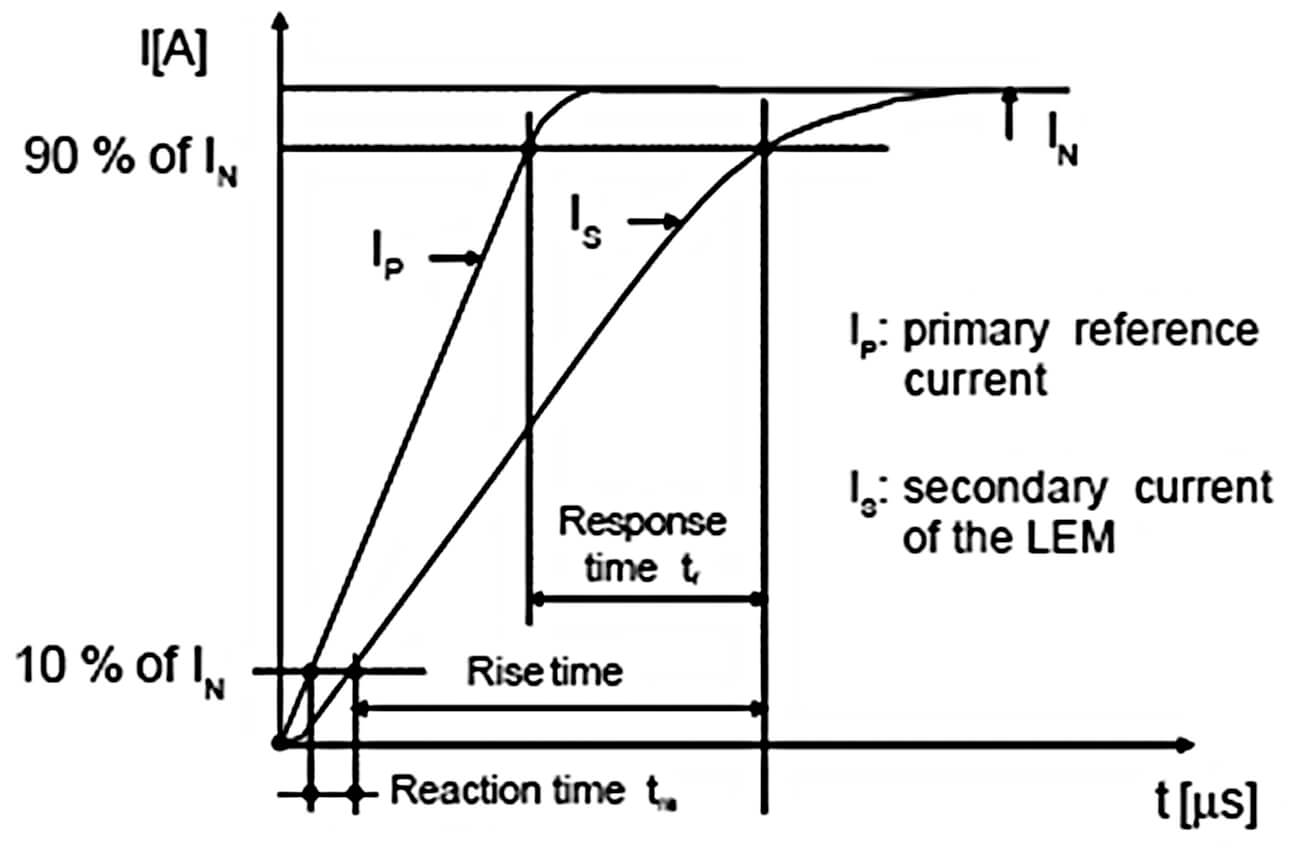
如何定義響應時間(TR)?
這個值用于表征傳感器的的動態特性。響應時間指的是從原邊電流達到其最大值的90%開始到傳感器的輸出達到其最大值的90%結束的時間間隔。原邊電流階躍信號的斜率為給定值(通常為100A/μs),幅值接近額定電流 IPN .
-
反應時間如何定義?
LEM將反應時間Tra定義為被測信號和輸出信號均上升至總變化量的10%時的時間間隔。 IPN .
-
“di/dt精確跟隨”是什么意思?
該值用于表征傳感器的動態跟隨被測電流快速變化的能力,“di/dt精確跟隨”是指對被測電流變化到90%時,響應時間不超過1毫秒。 IPN.
-
頻率帶寬BW是如何定義的?
頻帶寬度是指信號頻率從0Hz到衰減-3dB對應的截止頻率之間頻帶范圍,除非另有規定。它是被測信號的振幅和相位隨時間變化的速度。因此,帶寬越大,信號參數的變化就越快。
衰減到-3dB意味著對應的信號功率或幅值衰減到一半
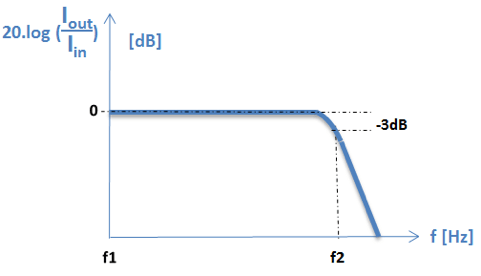
由于磁損耗導致磁芯發熱,所以不能在整個頻率范圍內考慮額定電流。為確保功耗在安全范圍,當信號頻率增加時相應的RMS電流值就要減少。因此,在數據表中給出的頻率帶寬是在小信號下測量得到的。
-
為什么傳感器會有磁芯損耗?
磁芯設計和電流的幅值和頻率特性決定了磁芯損耗的水平。磁損主要是由磁滯回線中的封閉區域引起,如下圖。
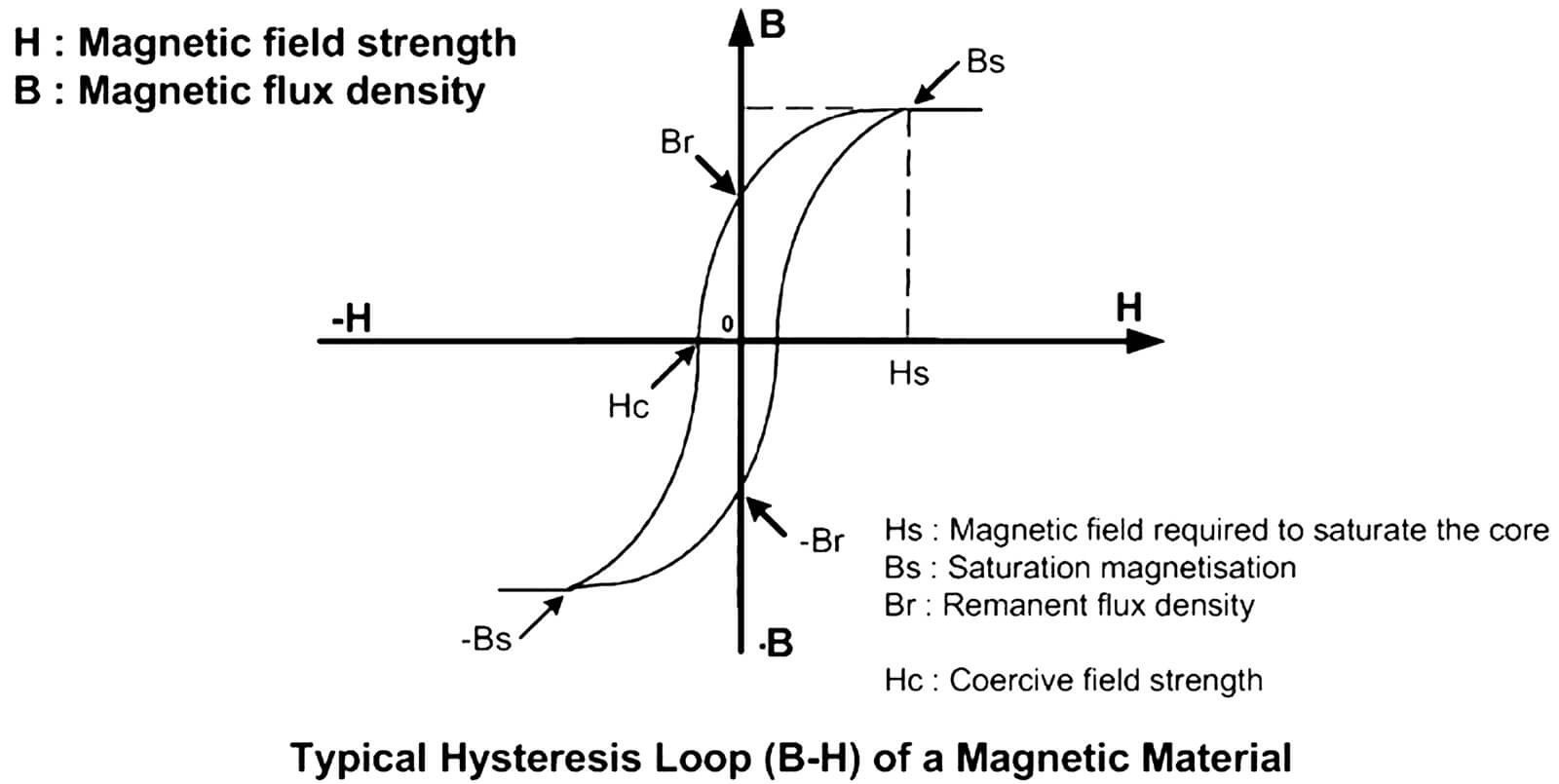
磁損 由 渦流損耗 和磁滯損耗組成.
- The 渦流損耗s是指由渦流帶來的磁場能量的損耗.渦流主要是指 由交變磁場 引起的 環流 , 這是由 法拉第電磁定律決定的。. 這些損耗與鐵芯的磁通密度峰值、鐵芯的頻率和疊片厚度成正比。
- 而 磁滯損耗 .是磁性材料在反復磁化過程中因磁滯現象而消耗的能量,與頻率、磁芯體積和磁通密度的平方成正比關系。
在高頻條件下,磁芯損耗是限制該頻率下電流幅值的重要因素(決定傳感器的溫升)。這也就意味著不僅僅要限制基波電流的最大頻率,還要包括諧波分量,因為即使是低振幅的小信號也有可能造成很大能量損耗。
-
什么是電流降額曲線?
高頻電流應用下的傳感器的磁芯損耗較大,為保證傳感器損耗不變,需要降低額定電流。但由于磁芯幾何形狀的復雜性,磁芯損耗與頻率平方、磁通密度平方的函數關系,以及殼體的功率耗散問題,盡管計算和仿真電流有效值與頻率的降額曲線不是不可能,但確實非常困難。
改變原邊電流有效值和頻率,并保證不超過最大允許溫度,可以在傳感器內部進行溫度測量,從而得到RMS電流與頻率的降額曲線。
-
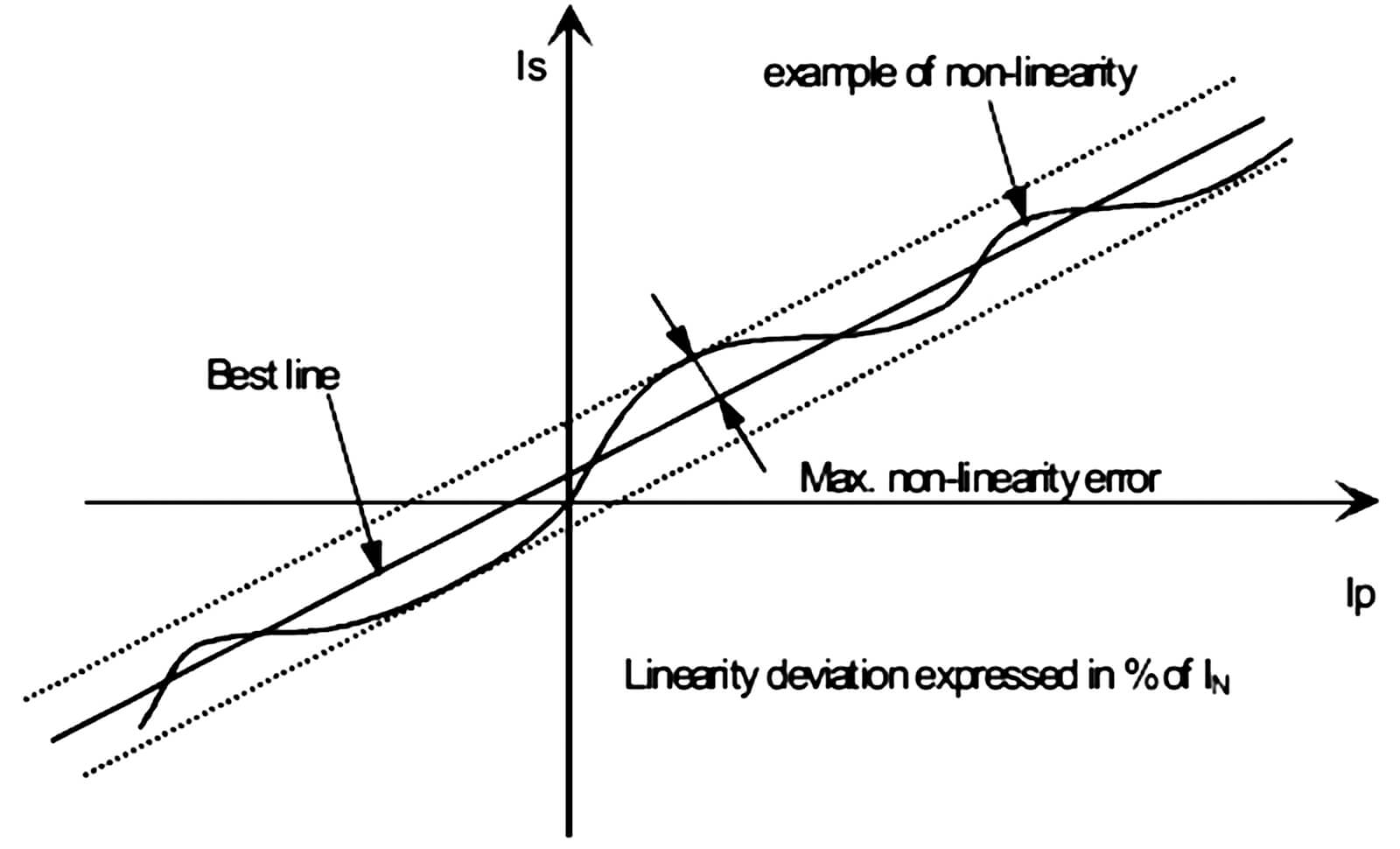
如何測量靈敏度和線性度?
.測量靈敏度和線性度時,原邊直流電流從0循環到 IPM 然后到IPM再回到0。
靈敏度 G 定義為在整個電流范圍內線性回歸線的斜率(在整個 ±IPM循環內).
線性誤差是最大的正向或負向測量點與線性回歸線之間的差值,以占測量值的最大百分比來表示。
-
使用ASIC集成芯片技術的傳感器有什么優點?
ASIC(專用集成電路)顧名思義,是一種集成電路,可提供多個特定功能。
它的優勢:
- 提升整體精度
- 降低成本
- 減小體積
- 功能定制
- 抗外部干擾性強
- 提升質量水平(可靠性、老化等)
-
只有單電源供電時傳感器是如何工作?
絕大多數的閉環傳感器是需要使用用于雙極性電源的(例如±15V)。然而,如果只測量單向電流,很多傳感器也可以工作在單極性電源下。此時,必須考慮以下幾點 (solution is not valid for DV and DVL family):
- 電源電壓應等于規格書中標示的正電壓和負電壓之和(例如±15 V的傳感器應使用﹢30V電源)。
- 測量電阻和最大工作電流的選擇不能使傳感器輸出功耗過大(請聯系萊姆以獲得正確的測量電阻取值范圍)。
- 輸出級的設計是用于雙極性電源條件下,輸出端必須串聯二極管來實現最小的輸出偏置電壓,而不是產生一個零點偏移(見下圖)。
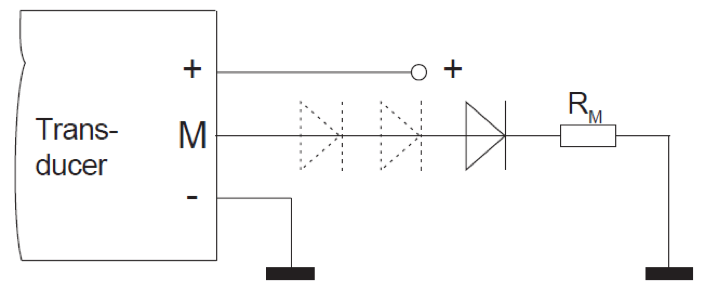
LEM產品線中有一些專門工作于于單極性電源的傳感器,建議在合適工作條件下首選進行電子設計。
-
如何避免電流傳感器被磁化?
根據傳感器的類型和所使用的磁性材料,磁芯的剩余磁通(剩磁)引起的額外的測量偏移,稱為“磁偏置”。它的值取決于磁芯的磁化強度,以及磁路飽和后達到最大值。磁化可能發生在:
- 大電流過載后
- 由于供電電源中斷(或欠壓)
由磁化引起的磁偏置將會慢慢消除,
- 自然狀態下,根據不同的磁性材料會慢慢恢復(這是一個非常緩慢的過程)。
- 通過對傳感器進行消磁,或者在原邊通入過合適的與原邊電流極性相反的電流,或者專用的的消磁循環,也可以恢復其初始性能。
-
傳感器能消磁嗎?
消除磁偏置需要進行消磁。消磁周期內要通過一個低頻交流源使磁芯通過整個B-H磁滯回線,然后逐漸減少勵磁,使B-H工作點回到原點。最少需要在滿量程下的5個周期,然后逐漸地減少激勵,每個周期的降低幅度不超過4%,在60Hz下需要30個周期或500毫秒。
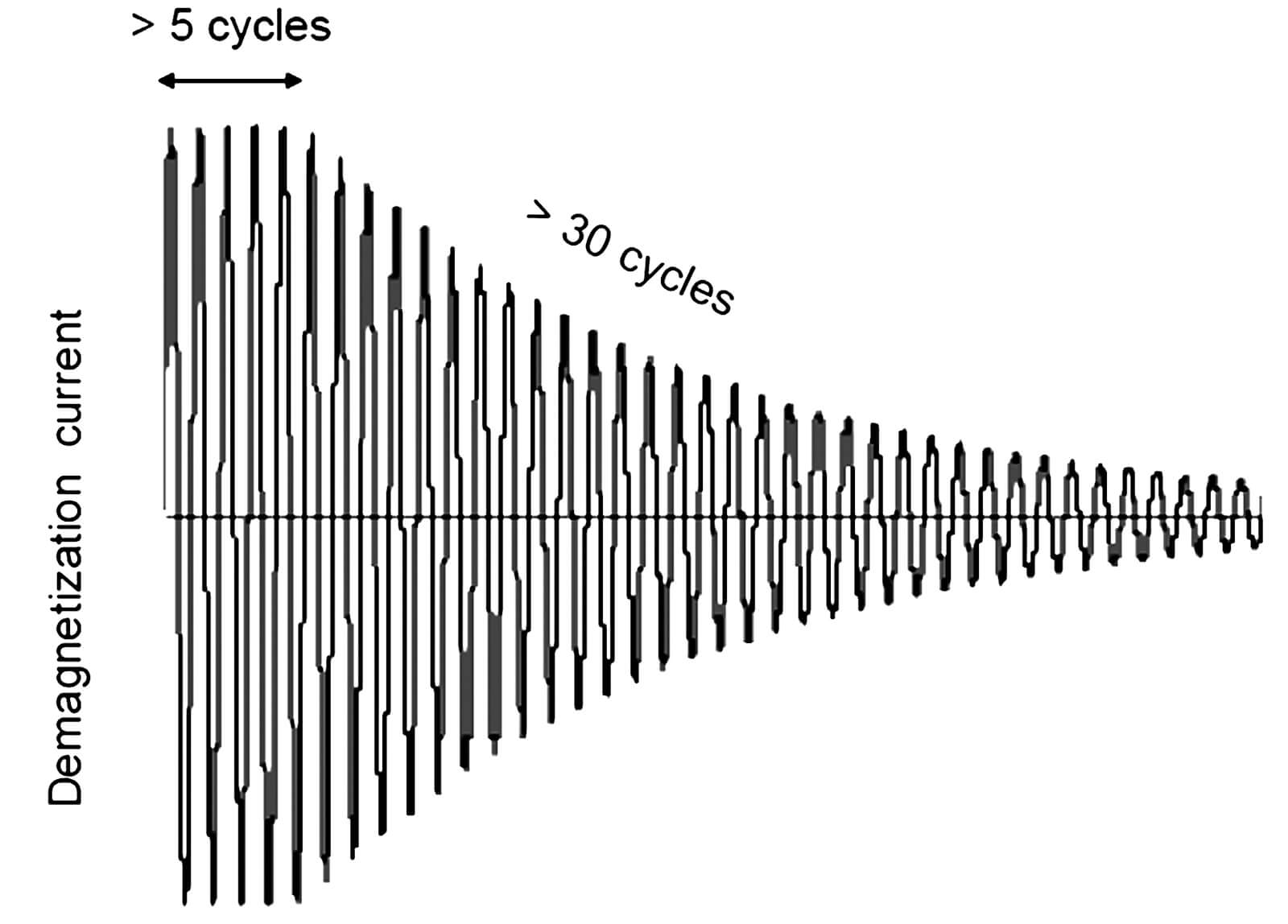
對于閉環傳感器,必須需要另外一個線圈,以保證補償線圈不抵消消磁效果。或者,通過提供適當的相反極性的信號,可以實現磁芯的部分消磁。這么做的困難在于確定準確的幅值和持續時間以獲得滿意的結果。如有一個定義好的應用程序,可根據經驗確定所需的值,并在必要時進行修正。
-
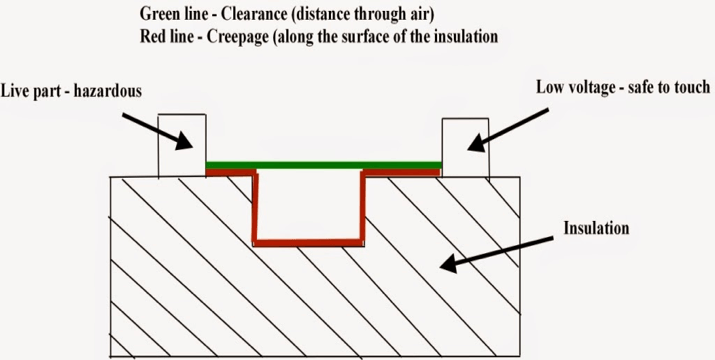
什么是電間隙和爬電距離?
若干國際標準規定了適用于其范圍內的設備的安全要求,其主要目的是確保設備對使用者在電氣、熱量和能源安全方面的危害降低到可接受的范圍內。
客戶的實際應用決定了所需的電壓(額定電壓,過電壓類別)、安全水平(功能絕緣、基本絕緣或加強絕緣)和環境條件(污染度),而傳感器的設計應確保絕緣材料材質(CTI)和最小絕緣距離能夠滿足要求。
安全標準是根據設備的性能要求來規定設備的帶電間隙、爬電距離和固體絕緣要求。其中也包括與絕緣相關的電氣測試方法。
- 帶電間隙DCL 是兩個導電部分間空氣中的最短距離它決定了產品能承受的沖擊耐壓。工作海拔超過2000m以上,帶電間隙應乘以修正系數,以確保合理的耐壓水平。
- 爬電距離dCp 是在兩個導電部件之間沿固體絕緣材料表面的最短距離。 尺寸應避免表面爬電引起的絕緣失效,應考慮:
- 應用系統的污染等級。
- 絕緣材料的CTI
爬電距離大于或等于間隙。
-
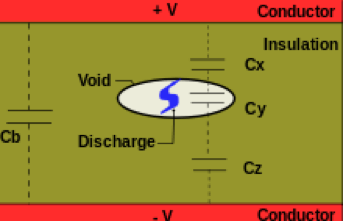
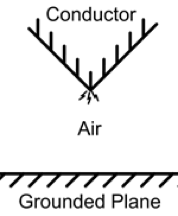
如何解釋局部放電現象?
局部放電是發生在部分絕緣部位的放電,經常是在空隙中。
由于絕緣間隙內的小電弧產生的高溫和紫外線輻射,絕緣層會被降解。慢慢地,這些間隙內的小孔穴逐漸增多,慢慢形成弧形。最終傳感器的初級和次級之間的絕緣完全破壞。
如果絕緣內的間隙增長持續好幾年,最終的絕緣破壞卻只需要一個或多個電氣周期。
局部放電試驗的目的是確保LEM傳感器的產品壽命。這就保證了固體絕緣(灌封+外殼)所承受的電壓應力,從長遠來看:
- recurring peak voltage重復峰值電壓
- 最高穩態電壓
- 長期的暫態過壓
在LEM產品規格書內,我們將標明局部放電熄滅電壓UE的值在10pc水平(舊版規格書)或局部放電試驗電壓Ut(新產品)。
- 我們建議一定避免出現尖銳的形狀(否則可能出現電暈放電的危險)。
- 原邊導體位于孔徑中心
- 原邊導體尺寸:
- 在LEM內部的常規測試是以最壞的情況也就是原邊導體完全充滿孔徑(與內徑表面接觸)進行測試的。
- 特定的原邊導體尺寸也可以由用戶要求:原邊道題尺寸和孔中的位置符合對應的UT值。